28年度 モデル2 見守り支援
コニカミノルタ株式会社
導入機器の概要
- 機器名:ケアサポートソリューションTM
- 機器メーカー:コニカミノルタ株式会社
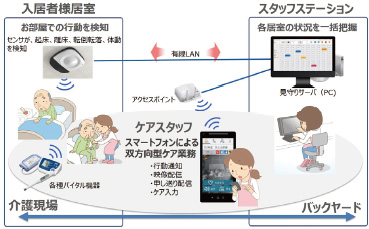
「駆け付けてみないと分からない」から「状況を見て駆け付ける」へ
介護施設の入居者各室天井に設置した2次元エリアセンサーとマイクロ波センサーにより、入居者の行動を検知し、起床・離床・転倒・転落、呼吸停止時には、介護職員が所有しているスマートフォン(以下スマホ)に映像と共に通知を行う。従来の「とにかく駆け付けてみないと分からない」から、居室の「状況を見て駆け付ける」ことを可能とした。
また、「介護記録の入力」や「バイタル情報の記録」についても、スマホの無線通信機能を備えたバイタル機器とスマホとの通信により、スマホからバックヤードのサーバーにデータ送信を行える。(紙への記載・PCへの転記不要)
以上のように、介護現場からバックヤードまでの介護業務効率化を、介護ワークフローの変革により実現可能とした。
 システムの概要 |
 |
 |
機器導入経過の概要
機器導入前の課題
介護施設職員の業務内容・業務フローを観察、計測、分析
① 評価対象施設概要
入居者数:27名
フロア数:1フロア3ユニット
日勤帯介護職員数:8名(入浴担当者を除く)
夜勤対介護職員数:2名
② 介護業務の観察、計測
下記日程にて、対象介護施設の介護職員の業務内容・業務フローについて観察した。
2017年1月5日(木) 14:00~20:00 4F中央ユニット
2017年1月5日(木)~6日(金) 18:00~13:30 4Fフロア全体
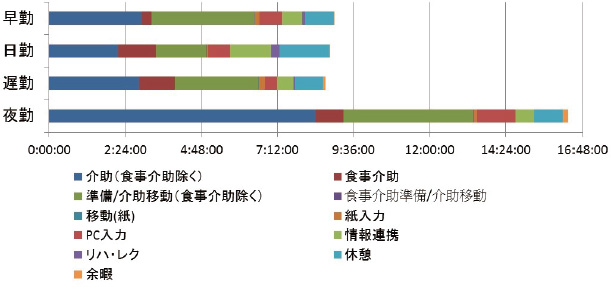
さらに、下記日程にて介護職員の業務内容・業務時間を測定した(測定は時計計測)
2017年1月10日(火)~1月13日(金)
早勤、日勤、遅勤、夜勤、各時間帯に応じて
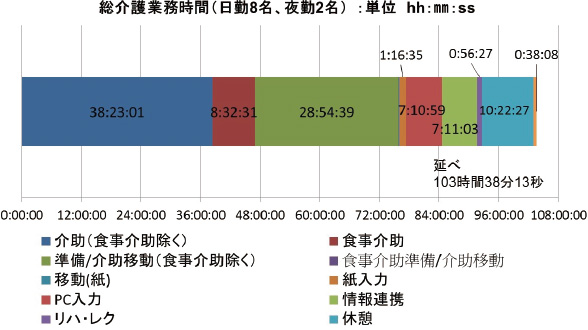
事前測定結果は以下の表のとおり。
各シフト業務時間(残業含む)
各シフト業務時間(残業含む)
| シフト | 運動量(歩数) |
|---|---|
| 早勤 | 11,599歩 |
| 日勤 | 9,821歩 |
| 遅勤 | 11,827歩 |
| 夜勤 | 23,878歩 |
③ 介護業務分析結果
上記測定結果のうち、介助業務、介助準備、介護記録(紙入力/PC入力)業務、情報連携(申し送りなど)業務をさらに詳しく分析していくと、下記のような課題があることが分かった。
<介助業務、介助準備業務>
- 起床センサー利用者への対応:起床センサーからの通知を受けた介護職員はすぐに駆けつけるが、特に日中は通知件数も多く、また状況も分からないまま駆けつけているため介護職員への負担は大きい。
- ナースコール対応:介護職員はナースコールを受けるとすぐに駆けつけるため負担がかかっている。
- 介護職員は、起床センサーやナースコールの通知を受けて訪室し、状況把握の後、介護や介助を行う。しかしながら状況が分からないまま訪室するため、介護や介助業務の準備のための手戻りが発生し、介護職員の負担になっている。
<介護記録業務>
- メモに一次記録を行い、PCに転記しているため、記録作業に時間がかかっている。
- 介護記録業務は介助業務等の合間にPC入力しているため、誤記や漏れが懸念される。
<情報連携・申し送りなど>
- 日勤者は、他の日勤職員より30分間の申し送りを受けた後、夜勤者へ30分間の申し送りを行っており、申送りに業務時間を取られている。
機器導入後の経過
介助業務・介助準備業務、介護記録、情報連携の各課題で導入効果を検討
上記「介護業務分析結果」に基づき、施設側と協議を重ね、各課題について、介護ロボット(ケアサポートソリューションTM)の以下の機能を活用し介護業務効率化を図り、導入効果について検討を行った。
<介助業務、介助準備業務>
起床・離床通知機能。ナースコールの際のスマホによる映像確認機能
<介護記録機能>
その場でケア記録作成機能
<情報連携・申し送り>
スタッフ伝言板機能
機器活用のためのフォローアップ
職員に操作方法、記録作成等実践的な教育を実施
- 2017/1/16~18に、実施施設の介護職員へ、設置・施工した介護ロボットを使用し、操作方法等実践的な教育を実施した。
- 2/1~2/2にかけて、介護職員に、介護ロボットで使用するスマートフォンからの介護記録作成操作を説明、及び教育を実施した。また、先行的に介護課長に介護現場での試験運用をしていただき介護職員への展開方法を検討した。
機器と施設・介護方法の適合
居室ごとに差異のある、行動検知による通知性能をプログラム修正
① 機器のセットアップ
2016年12月に作成した実施計画に基づき、2017/1/5~12に、実施施設にて、介護ロボットの設置・施工を完了。また、設置した介護ロボットを活用し、1/16~18に実施施設の介護職員へ導入教育を実施した(上述)。
実施施設への介護ロボットのセットアップや介護職員への説明や教育は、2月度にすべて完了した。
② 機器の改良
入居者の居室ごとにベッド等の配置が異なるため、行動検知による通知性能に差が生じた。当社開発部門にフィードバックし、プログラム修正の対策を取った。
その後、介護ロボット稼働後に、約週1回の頻度で介護職員に改善項目のヒアリングを実施。ソフト面・ハード面含む使い勝手の面などについて、情報を集約中。
当社開発部門に情報をフィードバックし、今後の開発に活用する予定である。
実証評価の結果
「従来のナースコールには戻せない」との声
(1)定量的な事後評価に関しては、3月15日(水)および3月22日(水)の2回測定を計画している。
(2)本「介護ロボット」を使用した施設にヒアリングし、以下のコメントをいただいている。
現状定性的評価として職員様の声
<映像通知について>
- 従来はナースコールがなると駆け足で居室に駆けつけていたが、ライブ映像は入居者の状況把握が可能になり、結果的に駆け足での駆けつけがなくなった。
- 起床通知を受け、ライブ映像で入居者が起きるか起きないかがわかり、対応の判断ができるようになっている。
- 夜勤は2名で3ユニットを見ている。他のユニットの様子が訪室せずして把握できるのは大変助かっている。逆に従来のナースコールには怖くて戻せない。
<安否確認業務について>
夜間の安否確認回数の削減可否について:本事業評価期間の兼ね合いから今回の運用評価での実施は困難であったが、今後入居者との協議の上、合意が得られれば本介護ロボットを活用した訪室回数の削減についても検討したい。
<転倒時の記録映像>
転倒時の記録映像は大変役立っている。
① 家族への説明
入居者が居室内にて転倒しケガを負われたケースがあった。施設から家族に原因説明したが説明のご理解がいただけず、転倒時の記録映像を使い家族に説明した結果、理解が得られた。
② 医師への上申
転倒発生後、記録映像を見た介護職員が適確にかかりつけ医に説明できるため適切な処置につながっている。また、かかりつけ医が直に見ることで診断ができている。
<介護記録について>
① 食事記録:従来の記録項目/記録方法と同様であり、入力も簡単であるため本介護ロボットのやりかたに移行することに問題はない。
② 水分記録:従来の記録項目とほぼ同様であるため移行に支障はない。
水分種のメニュー(コーヒー、味噌汁など)や、補給量の初期値(例えば300ml)については、施設に応じたメニューを提供していただけるとさらに使い易い。
<スマホによる記録入力について>
- 記録入力が、スマホから簡単に、かつタイムリーにできるのが良い。
- 従来のPCがあるユニットに戻ることなく、介護の現場(その場その場)で入力できるのが良い。
今後の課題と展望
評価結果や課題、要望などを、次期開発にフィードバック
従来の介護業務のワークフローに着目し、その中での「お困りごと」を分析・抽出し、介護ロボットを活用したワークフローの変革による業務効率化を図った。
結果としては、実際に使用していただいた介護職員からは、「スマホへの通知」と「映像による確認」について、非常に助かるという前向きなコメントをいただいている。
時間計測による「定量的な評価」は、3月15日と3月22日の測定結果で明らかになるが、本介護ロボットの有用性については、概ね、当初の想定通りであったと考えている。
本事業で、一部設置の際の「入居者のベッド位置による、センサボックスの初期設定(キャリブレーション)」に想定より時間を費やした件などは、すでに当社開発部門にフィードバックを行い、ソフトウエアのバージョンアップなどの対策を取った。
短期間での計画作成・設置・教育・実施・評価ではあったが、当初の想定以上に本介護ロボットの効果を確認していただいたと考えている。
介護ロボットメーカーである当社としては、本事業で得られた評価結果や課題あるいは使い勝手に対する要望などを、次期の介護ロボットの開発にフィードバックし、より介護業務の効率化や、介護の質を向上させるソリューションを提供していく。
